拡張現実は仮想現実の影の中に存在するように長い間思われてきました。私たちとは別の完全に仮想世界を訪れるという考えは、長い間、一般の人々の想像力を捉え、私たちの既存の世界の「増強」よりも優先されてきました。一方、拡張現実は、工業生産などの企業環境で多くの実用的なアプリケーションを長い間保持してきました。これにより、ユーザーは仕事でテクノロジーに慣れることになり、家庭での消費者の拡張現実の使用が急増する可能性があります。
テクノロジーリサーチ会社のGartnerは、仮想現実は2020年から2023年までに大量採用されると予測していますが、拡張現実はそれから数年後に大量採用されると予測しています。つまり、拡張現実が大規模に採用されるまでには10年かかる可能性があり、これは論理的な結論のようです。
バーチャルリアリティと拡張現実の両方に、解決すべき技術的な問題があります。拡張現実は、仮想現実が経験するほぼすべての同じ問題を共有しますが、現実世界のオブジェクトを検出するためのコンピュータービジョン、透明ディスプレイ上の固有のディスプレイフォームファクター(パススルーとしてビデオカメラを使用しない場合)、デジタルオブジェクトを解決するための追加の問題があります配置、現実世界内の所定の位置にデジタルホログラムをロックするなど。
拡張現実:フォームファクターと第一印象
バーチャルリアリティに追いつき、公共の意識の脚光を浴びる拡張現実の最大の試みも、それが対処しなければならない最大の問題の1つであることがわかるかもしれません。バーチャルリアリティを体験するには、ユーザーは高価なヘッドセットやコンピューターなどの追加の周辺機器を購入して電力を供給する必要があります。標準のモバイルデバイスに拡張現実を追加すると、すぐに拡張現実の形式が数億人のユーザーの手に渡ります。
ただし、拡張現実のその経験は、最適とは言えません。AppleとGoogleのエンジニアは、主にその目的のために構築されていないデバイスに拡張現実体験をもたらすという驚くべき仕事をしましたが、拡張現実に関するほとんどの消費者の最初の体験は、モバイルデバイスが提供できるものに限定されます。
ことわざにあるように、第一印象を与えるための二度目のチャンスは決してありません。ユーザーがモバイルデバイスで低品質の拡張現実体験を持っている場合、その体験を一般に拡張現実と広く関連付け、モバイル拡張現実体験が提供できるものと同じくらい高度な技術を完全に却下する可能性があります。次に、潜在的に優れた拡張現実体験を提供するために存在する無数の他のフォームファクタを却下する場合があります。
拡張現実:コストと可用性
「第一印象」の問題の解決策は、それ自体の問題です。多くの拡張現実ヘッドセットとメガネが開発中であるように見えますが、2018年に購入できるのは一部のみであり、ほとんどがエンタープライズ向け、「デベロッパーエディション」、または一般に一般消費の準備ができていません。
さらに、多数の低コストのヘッドセットが利用できるバーチャルリアリティとは異なり、拡張現実ヘッドセット/メガネハードウェアは簡単に数千ドルの費用がかかる可能性があり、最も熱心なイノベーターや早期採用者以外のすべての人の手の届かないところにあります。このコスト差は、拡張現実の大量採用が仮想現実よりも数年遠いと推定される理由を説明するのに役立ちます。
拡張現実、特に拡張現実ヘッドセットは、採用の初期段階であるイノベーター段階に非常に多く存在します。アーリーアダプターのこぶを克服し、その溝を越えてアーリーマジョリティの消費者採用段階に到達することは、テクノロジーにとって難しい場合があります。
拡張現実の認識された有用性
世界最高のハードウェアは、素晴らしいソフトウェアが付属していなければ意味がありません。一般の人々は拡張現実の約束に興味をそそられているようですが、多くの人はそれを何に使うのかよくわかりません。完全に仮想化された世界に身を置くことができることは、人気のあるメディアによって比較的深く探求されてきたため、多くの人々は仮想現実の利点を理解しています。一方、拡張現実はもう少しレーダーの下に残っており、一般の人々がそれがどのように使用されるかを想像するのは困難です。
これは、鶏が先か卵が先かというシナリオの場合があります。ソフトウェア開発者は、特定の消費レベルに達していないハードウェア用のソフトウェアを構築することを望んでおらず、消費者は、使用するアプリケーションの幅広い基盤を持たないハードウェアを購入することを望んでいません。ユーザーは、これらのデバイスを購入するための説得力のある理由が必要です。
消費者の採用を促進する「必須」のアプリケーションを作成するには、数人の進取的なソフトウェア開発者が必要になる可能性があります。これらのソフトウェア開発者の道はうまく行きませんが、8月の最初の「キラーアプリケーション」を作成する道は見事に報われるでしょう。
拡張現実が得意なことを示す拡張現実アプリケーションはすでに数多く存在します。
拡張現実と追跡
拡張現実の最大の特徴の1つは、デジタルオブジェクトを3次元の現実世界の空間に配置する機能です。オブジェクトの配置は、オブジェクトの移動先を示すために実世界のマーカーを使用して行うのは適度に簡単ですが、多くの拡張現実アプリケーションの最終的な目標は、マーカーなしの追跡です。
以下の例は、マーカーベースの拡張現実の例を示しています。マーカーベースの拡張現実では、カメラ/コンピュータービジョンが向きを変えるために、特別に設計されたマーカーを実世界の空間に配置する必要があります。この例では、QRコードの紙のプリントアウトがテーブルに配置されており、拡張現実ソフトウェアがその上に立方体のデジタルホログラムを配置しています。コンピュータビジョンはマーカーなしの追跡ほど洗練されている必要がないため、マーカーベースの拡張現実は追跡するための非常に強固な基盤を提供できます。マーカーを認識するだけです。

マーカーベースの拡張現実。
拡張現実について議論するときに耳にする用語の1つは、コンピュータービジョンです。コンピュータビジョンは幅広い研究分野ですが、拡張現実のコンテキストでは、通常、コンピュータがデジタル画像またはビデオを介して見ている環境をどのように理解できるかを説明します。
マーカーのない拡張現実を処理できるコンピュータービジョンは、現実世界の3D空間を複雑に理解する必要があるため、技術的に困難です。私たちの脳はシーンを表示し、壁、窓、出入り口を簡単に区別できますが、コンピューターはピクセルのコレクションを見るだけで、一方のピクセルが他方よりも意味のあるものはありません。コンピュータービジョンは、コンピューターがピクセルのコレクションを取得し、それらが何を意味するかを理解する方法を説明します。たとえば、テーブルの画像が与えられた場合、コンピュータビジョンにより、アプリケーションはそれをピクセルのコレクションとして認識するだけでなく、高さ、幅、奥行きのある3D空間内のオブジェクトとして識別できます。
マーカーのない拡張現実に必要な処理を実行できるシステムでも、処理の実行中に遅延が発生する可能性があります。一部の拡張現実デバイスは、環境の処理が他のデバイスよりも高速です(HoloLensはこの点で特に優れたパフォーマンスを発揮します)が、多くの拡張現実デバイスは、ある程度の追跡遅延(遅延)に悩まされています。モバイルデバイスを移動したり、頭の位置をすばやく変更したりすると、現世代の最高のデバイスであっても、物理的な空間に配置されたデジタルホログラムのシフトが見られる場合があります。
しかし、現実の世界では、頭を向けたときに椅子の位置が変わったり、床を横切ったりするのを観察した場合、家は幽霊が出ると思います。これらの追跡の問題は、今日の拡張現実体験で依然として一般的に発生しています。
トラッキングを正しく行うことは、拡張現実が直面する最大の課題の1つですが、物理空間に存在するユーザーのデジタルアイテムの錯覚を維持するのに大いに役立ちます。次世代のデバイスが追跡を優先し、現世代の追跡技術を改善することを期待してください。
拡張現実:視野
視野(FOV)は、デジタルホログラムが表示される可能性のある空間を指します。たとえば、モバイル拡張現実のFOVは、デバイス画面で表示可能なスペースの量です。デバイス画面は、拡張現実の世界への窓として機能します。この窓からデジタルを見ると、ホログラムが存在しない現実の世界しか見えません。
一部の現在の拡張現実ヘッドセット/メガネでは、デジタルFOVは通常、表示可能な領域全体ではなく、バイザーまたはメガネ内の非常に小さな領域のみをカバーします。これにより、小さなウィンドウまたはレタースロットから仮想世界を見つめる効果が得られます。
レタースロットを通して見るのと同様に、ホログラムは、ホログラムが表示されているとマークした領域にのみ表示されます。ホログラムを表示しないとマークした領域に該当するホログラムの部分は、その時点で切り取られます。ご覧のとおり、FOVが狭いヘッドセットは、FOVが大きいヘッドセットと同じレベルの没入感を提供するのがはるかに困難です。
明らかに、小さいFOVよりも大きいFOVの方が望ましいです。ホログラフィック画像が小さなウィンドウにのみ表示される場合、FOV内でホログラムが切り取られるのを見ると、エクスペリエンスから簡単に引き出されます。Meta 2は、現在のヘッドセットのバッチの中で最大のFOVを持ち、90度のFOVを主張しているように見えますが、人間の目のFOVに近づくまでには長い道のりがあります(垂直方向に約135度、水平方向に200度)。
拡張現実体験のFOVを改善することは、次世代のハードウェアで拡張現実を実現するための次の大きな飛躍の1つになるでしょう。実際、Microsoftは、次世代のHoloLensの現在のFOVを2倍以上にする方法をすでに発表しています。これは、ほとんどの人がHoloLensに抱く最大の苦情を解決するための大きな一歩となるでしょう。
拡張現実のビジュアル
現世代のバーチャルリアリティヘッドセットと同様に、現在の拡張現実ヘッドセットは、消費者が慣れている高解像度の要求を満たすのに苦労しています。
さらに、現在の拡張現実デバイスの多くは、オクルージョンが不十分です(オブジェクトが別のオブジェクトをブロックする効果)。拡張現実では、オクルージョンは通常、デジタルオブジェクトを覆い隠す物理オブジェクトを指します。あなたは、次のような拡張現実モバイルアプリで、この問題に気づいたかもしれポケモンゴー:時々 、あなたが地上Zubatホバリングと非常にリアルなシーンを作成することができます。また、ゼニガメが壁の中に半分詰まっているように見えることもあります。このようなビジュアルは、拡張現実における適切なオクルージョンの欠如によるものです。オクルージョンが適切に実行されると、デジタルオブジェクトは、実際のオブジェクトとの関係で正確かつ現実的に配置できます。オブジェクトの下、部分的に後ろ、上、またはシミュレーションで必要なものは何でもかまいません。
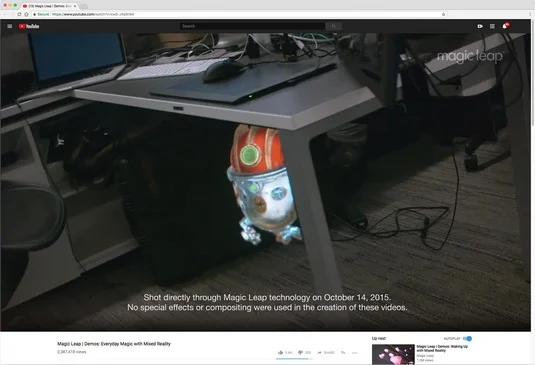
HoloLensとメタ2つのデバイスは、閉塞の合理的な程度を実行することができ、マジックリープのデモビデオはデバイスが持っているので、まだ半ば2018年のとして出荷するのに(閉塞の非常に高いレベルを示しているように見える、それが生産かどうかを予測するのは難しいですデバイスは、ビデオデモで設定された高いバーに到達できるようになります)。
以下の画像は、初期のデモビデオの1つに表示されたオクルージョンMagicLeapのスクリーンショットを示しています。ロボットのデジタルホログラムは、テーブルの上部と側面の脚によってシームレスに遮られます。Magic Leapがこの忠実度のグラフィックスを複製でき、大量消費者向けデバイスでこのレベルのオクルージョンを組み合わせることができれば、拡張現実の大きな前進となるでしょう。
それほど多くはないように思われるかもしれませんが、マーカーのない方向の観点から考えてください。ロボットをテーブルの脚の後ろに配置するには、シミュレーションソフトウェアは、ピクセルのコレクションを表示するだけでなく、3D空間を理解する必要があります。シーンを表示し、前景にあるもの、背景にあるもの、およびデジタルホログラムがこれらすべてに適合する場所を計算できる必要があります。「テーブルの下」が何を意味するのかを理解し、テーブルのどの部分が他の部分よりも空間的に前方にあるかを知る必要があります。それを達成するのは簡単ではありません。
![拡張現実に関する問題]()
出典:YouTube
MagicLeapデモビデオ。
拡張現実が大衆消費者規模で高品質の体験を提供するためには、動的環境のオクルージョンを解決することが、解決するための重要な問題になります。